INVERTED PENDULUM 00001 by Samuel Stubblefield and OPEN Studio
The inverted pendulum is an inherently unstable system used as a classic illustration of control theory and control of nonlinear systems.
This work is part of a larger body of work by the artist that uses technology to create a deep sense of awe and appreciation for the complexities of broader nature.
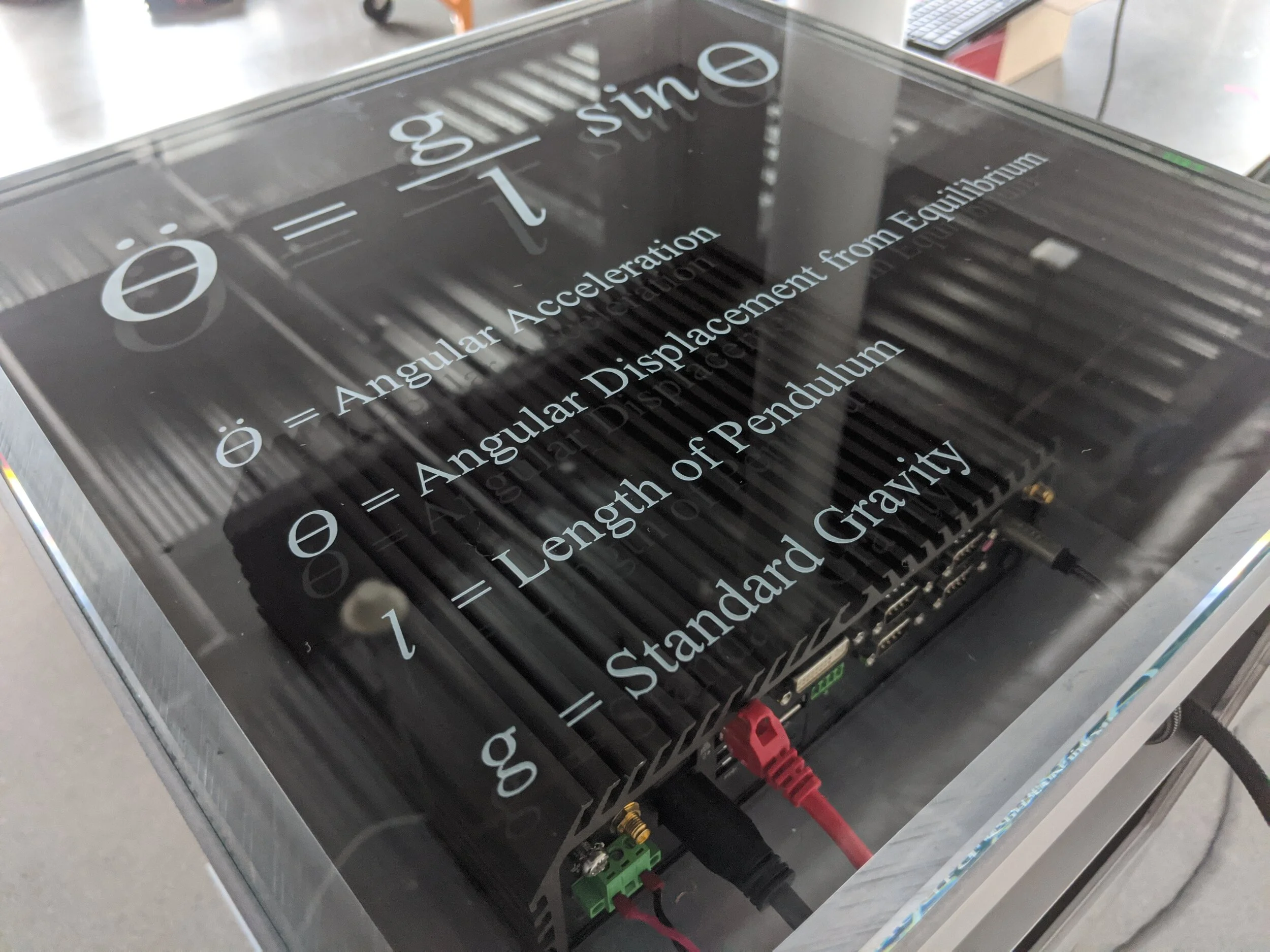
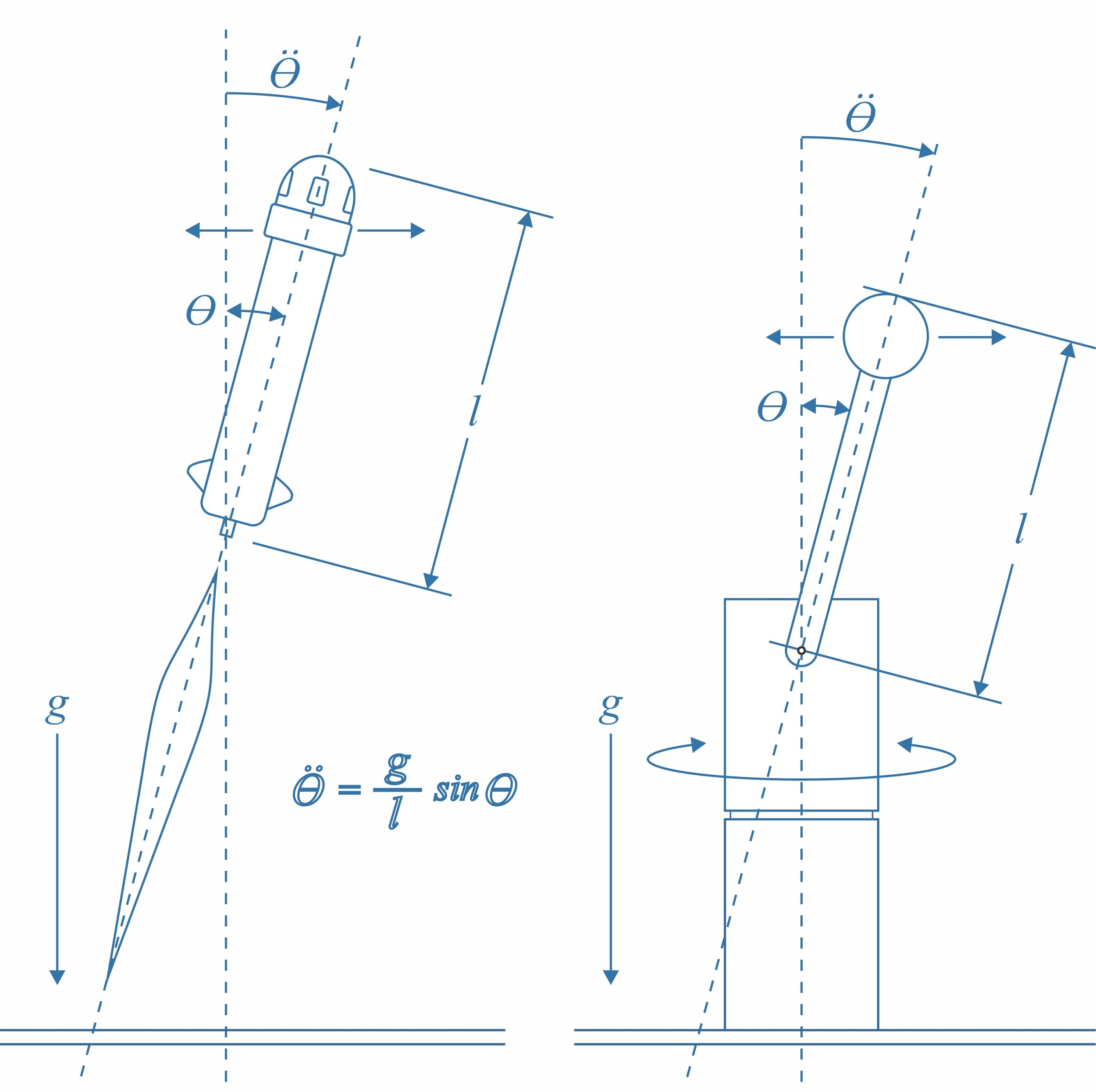
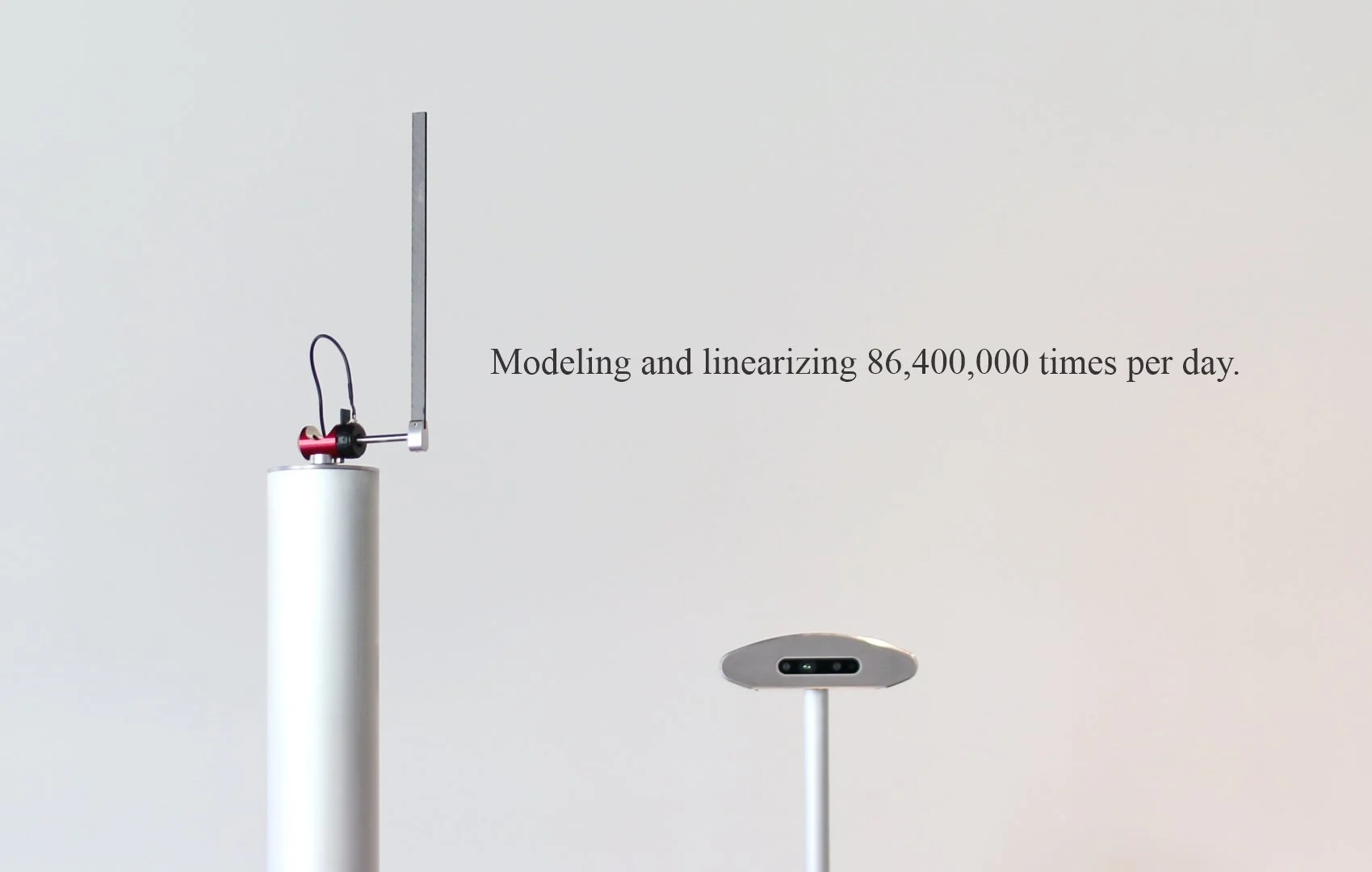
In this interactive sculptural installation, the studio has created an illustration of a control system in the form of a Furuta inverted pendulum. The inverted pendulum models an unstable, nonlinear system. With the application of control theory, the entire system is modelled and linearized.
The free-swinging carbon fibre arm is held up by horizontal movement. The computer controlling the horizontal movement observes and corrects relentlessly.
The sculpture uses computer vision to add another degree of complexity that is not part of traditional inverted pendulum experiments. As a viewer arrives at the piece, they are detected by the system. The pendulum responds by presenting the carbon fibre arm to the viewer. The system releases the sound of indigenous birds each time a new person is detected.
The form and material of the sculpture take from science fiction and the industries born of the literary and film genre. One might find elements from Flight of the Navigator, La Jetée, Saga, Short Circuit, Snow Crash, Star Trek, THX 1138, WALL-E, War of the Worlds, and many others.
The pendulum observes and corrects 86,400,000 times per day.
Project Assistants:
Amirpasha Javid - Engineering Assistance, Quanser
Arman Molki - Engineering Assistance, Quanser
Brian Douglas - Control Theory Consultation
Charna Parkey - Mathematics and Control Theory Assistance
Jason Jeffcoat - Industrial Design Assistance, CamTec
Joe Clark - Fabrication Assistance, Architectural Elements
Joshua Borsman - Technical Lead
Sellen Construction - Construction Management
Interested in learning more about control theory? Brian Douglas is one of the leading educators on the topic and has a number of entry points for learning how to make complex ideas intuitive and easy to understand. If you are curious and want to jump in, Brian and his extended resources can be found here: https://engineeringmedia.com/resources
All images ©2020 Samuel Stubblefield, LLC